An integrated advanced solution to be effective during surveys with our Zeno AUV!
Highlights:
Outdoor 15” Touchscreen (850 NIT)
Waterproof parts (IP65 min)
Long Endurance (UPS+ LiFePo4 4Sx60Ah)
External Ports:
1 x HDMI
2 x RS232
2 x USB3.0
2 x 802.3af/at PoE / GbE Ethernet
1 x (24V + RS232) Powered Acoustic Modem I/O
1 x (5V + 24V) Power Line
1 x Power Supply
External Antennas:
WiFi 2.4Ghz
UHF Radio 848Mhz
Integrated Antennas: GPS with u-Blox Receiver
Human Machine Interfaces
We believe in simple, robust and modern human machine interfaces.
Our goal is to enable customers to use our products without any additional complexity or specific know-how.
Mission Oriented Control Software
Dashboard
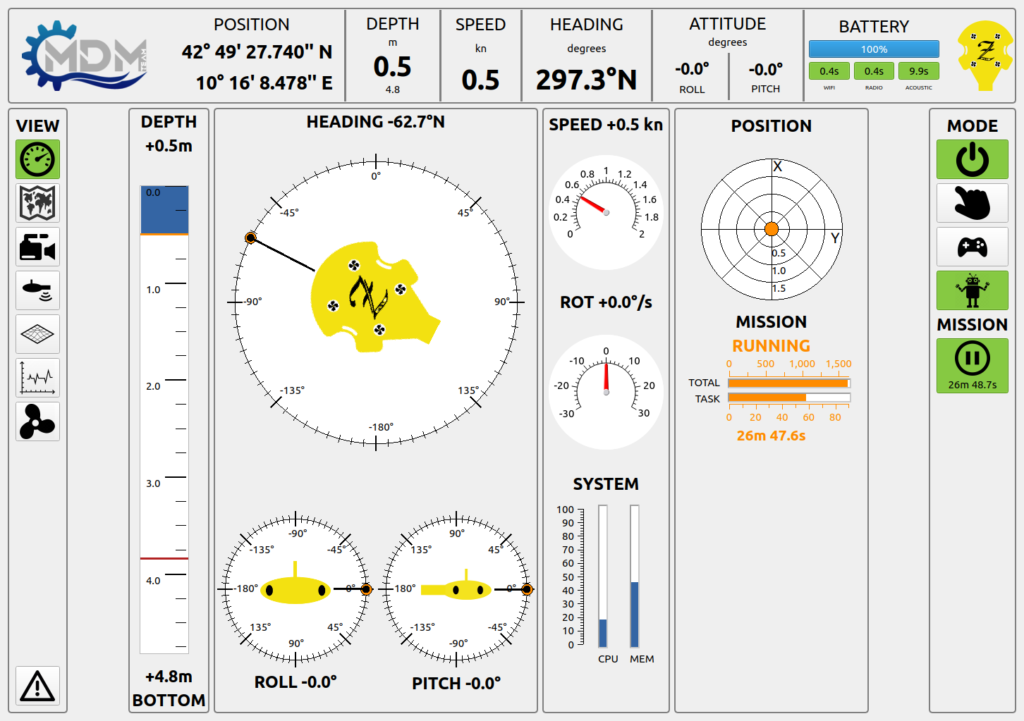
Dashboard
Dashboard view can be used to monitor mission details such as task duration vs mission duration, current speed and rate of turn. The vehicle depth is depicted together with the estimated sea bottom depth.
Finally, roll pitch and yaw can be adjusted when autonomous mode is selected. For small position changes a dedicated widget is used to perform motion relative to the vehicle heading.
Mission Planner
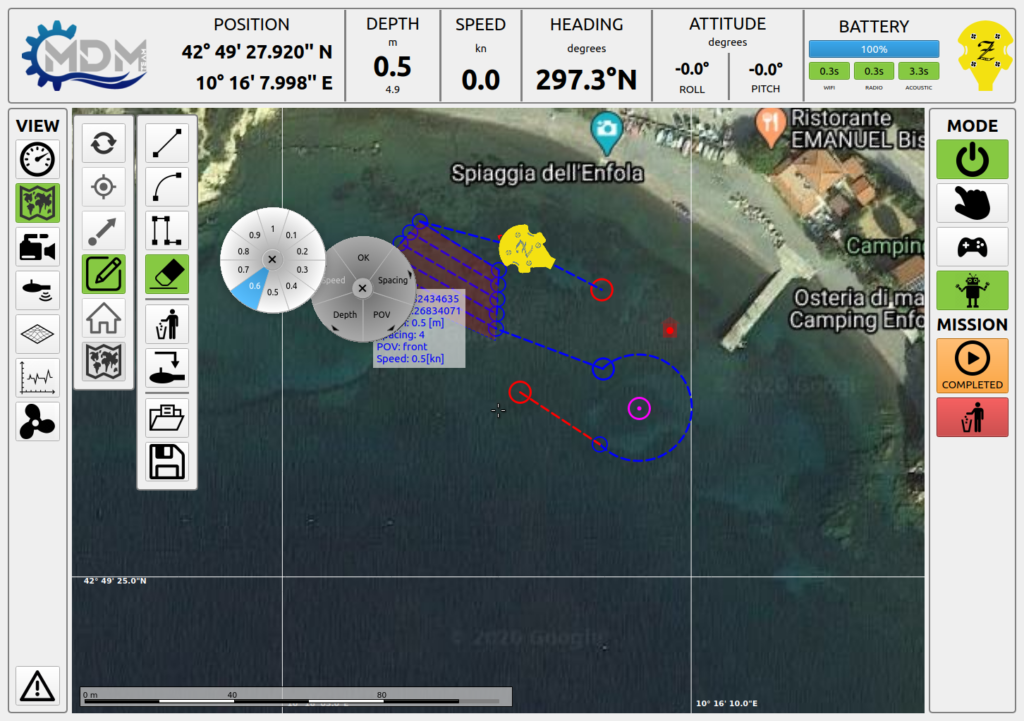
Mission Planner
Our mission planner is extremely advanced. We can perform classic survey patterns, lines and circle. Every task can be customized including for example depth reference, speed, survey lateral spacing and point of view.
Thanks to the controlled six degrees of freedom, Zeno AUV can perform advanced inspection tasks, for example rotating around a point of interest along a circle path without changing point of view to scan objects in 360 degrees fashion, or move along a line pointing sideways to scan ship hulls or submerged infrastructures.
Camera Feed
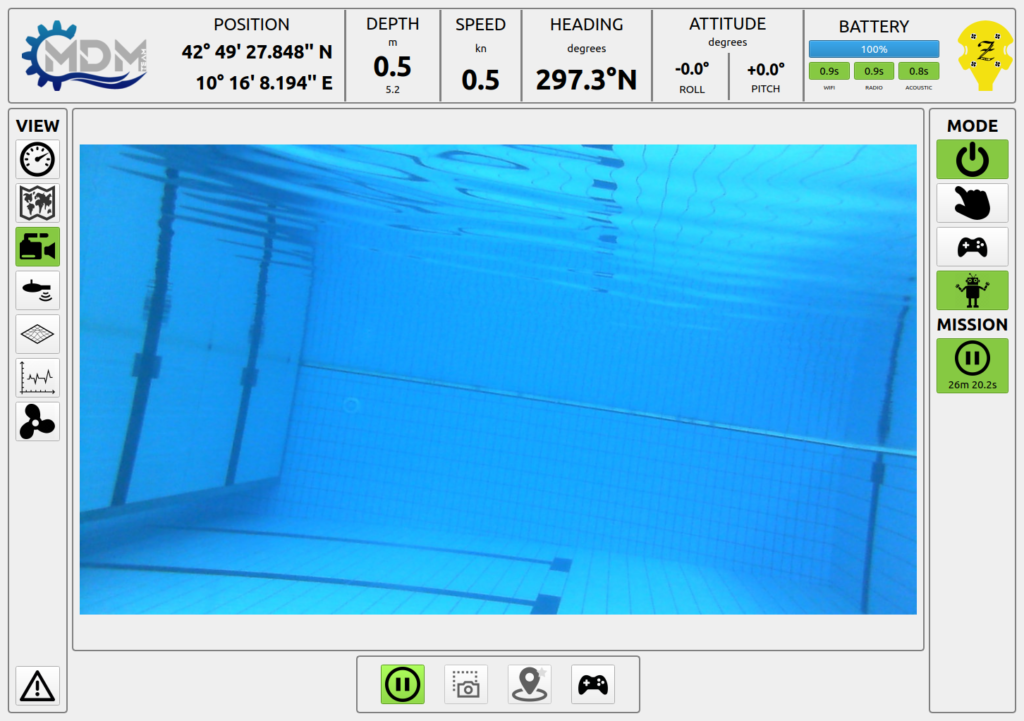
Camera Feed
We provide full integration of camera into our human machine interface to simplify inspections and provide the ultimate real-time feedback to our customer. We also provide an easy access to common features, for example to collect screenshot or to save a point of interest into the geographic map to support advanced replanning of the mission.
Acoustic Data
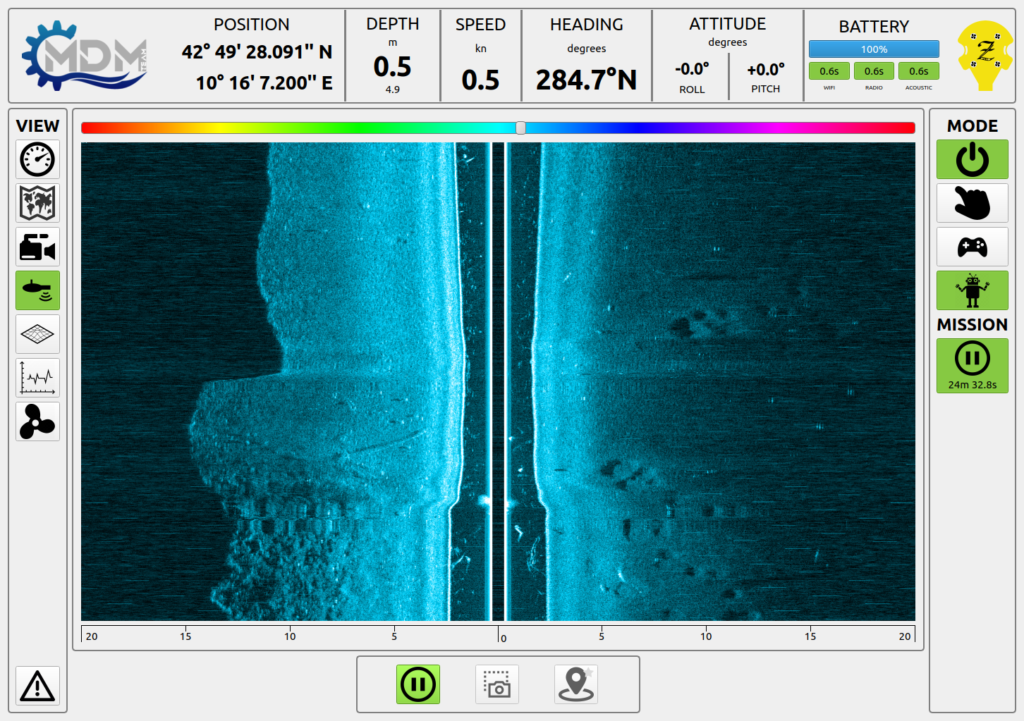
Acoustic Data
When used for seabed inspection, hydrographic or oceanographic purposes, ZENO AUV collects and send acoustic data to the human interface where is presented to the operator. Operator can easily take screenshot or save the point of interest into the geographic map to support advanced replanning of the mission.
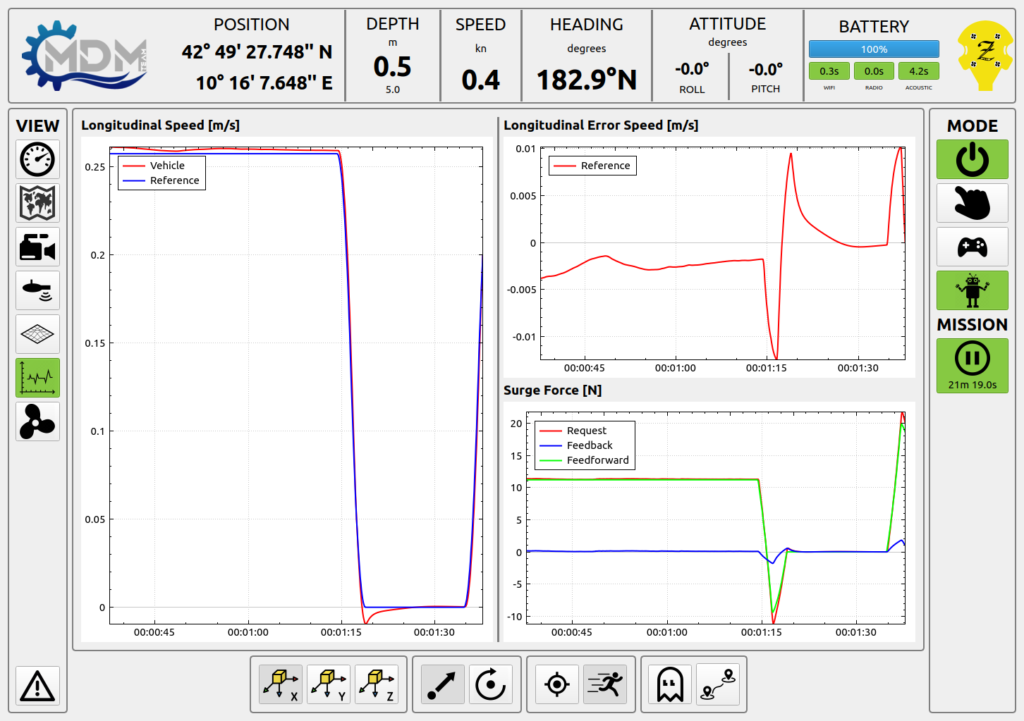
Real-Time Telemetry
Real-Time Telemetry
All data of the vehicle are presented through a simple interface providing access to both position, angles, speed over all axes.
With such a simple instrument, operator can monitor all the telemetry of the ZENO AUV while the vehicle is performing the underwater survey.
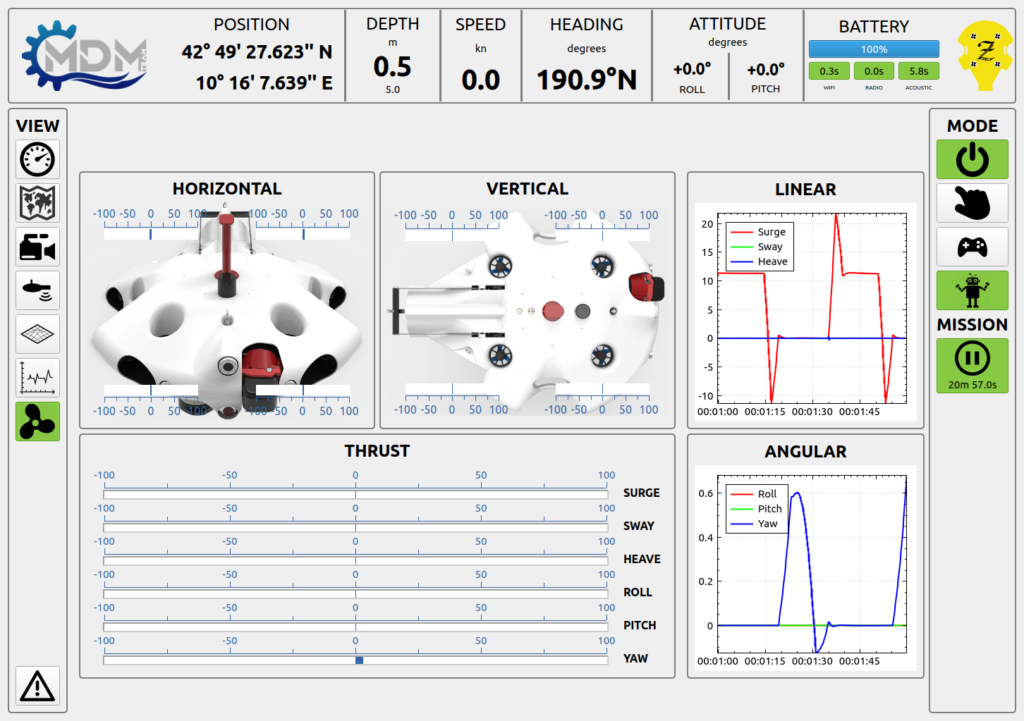
Motor Status
Motor Status
ZENO AUV is equipped with 8 underwater thrusters to enable motion over the six degrees of freedom (three translational and three rotational). The usage of every individual thruster is presented along with the overall forces and moments demand.
Advanced Mission Planning and Execution
Assisted Joystick Mode for Manual Operations
Automatic Real-Time Acoustic Map Reconstruction
Open for Customization
Our goal is to help our customers to have the best experience with our products.
To achieve this goal we designed our interfaces to be highly customizable to fit the best practices and modus operandi of our customers.
Contact us and let us help you to make your underwater survey more agile and cost-effective.
MDM Team S.R.L.
Via Venezia 4 50121 Firenze (FI) ITALY Mob. (+39) 392-264-1531 Email: info@mdmteam.eu VAT No: IT-06282350484